Diorama of Autonomous City II
Exhibition, Decoys & Depictions: Images of the Digital, Curated by Constance Vale, Mounted by Gallery Director Brandon Anscultz, Des Lee Gallery St. Louis, MO 2019



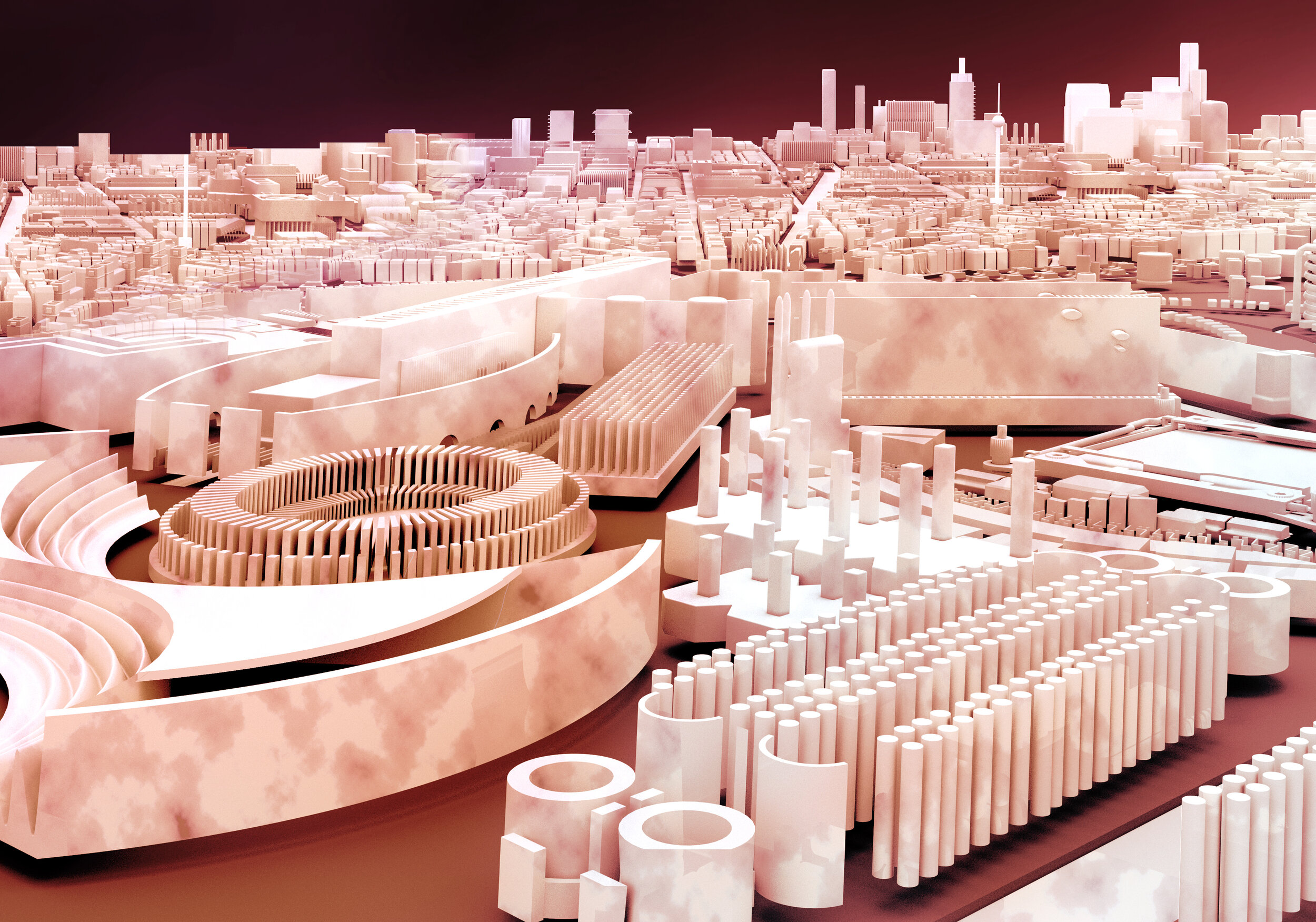


Autonomous City II creates a widely variable environment for the study of wide-ranging conditions that could be encountered by autonomous vehicles in urban off-highway scenarios. This serves as a study for a 1:8 scale physical model that will be built in order to perform tests using an F1/10 model autonomous vehicle with a full perceptual stack. The model city will be an immersive environment in which building-form, public space, material characteristics, and atmospheres will be controlled and transform over time, not unlike a film set. The architectural staging of scaled material effects and atmospheres may lead to new, hybrid material systems and digital fabrication strategies. Work will be conducted across software that records real-world environments with software that models digital environments, and compositing digital fabrication tools that shape three-dimensional form with those that apply two-dimensional color and image.
This research project will examine a series of questions, including:
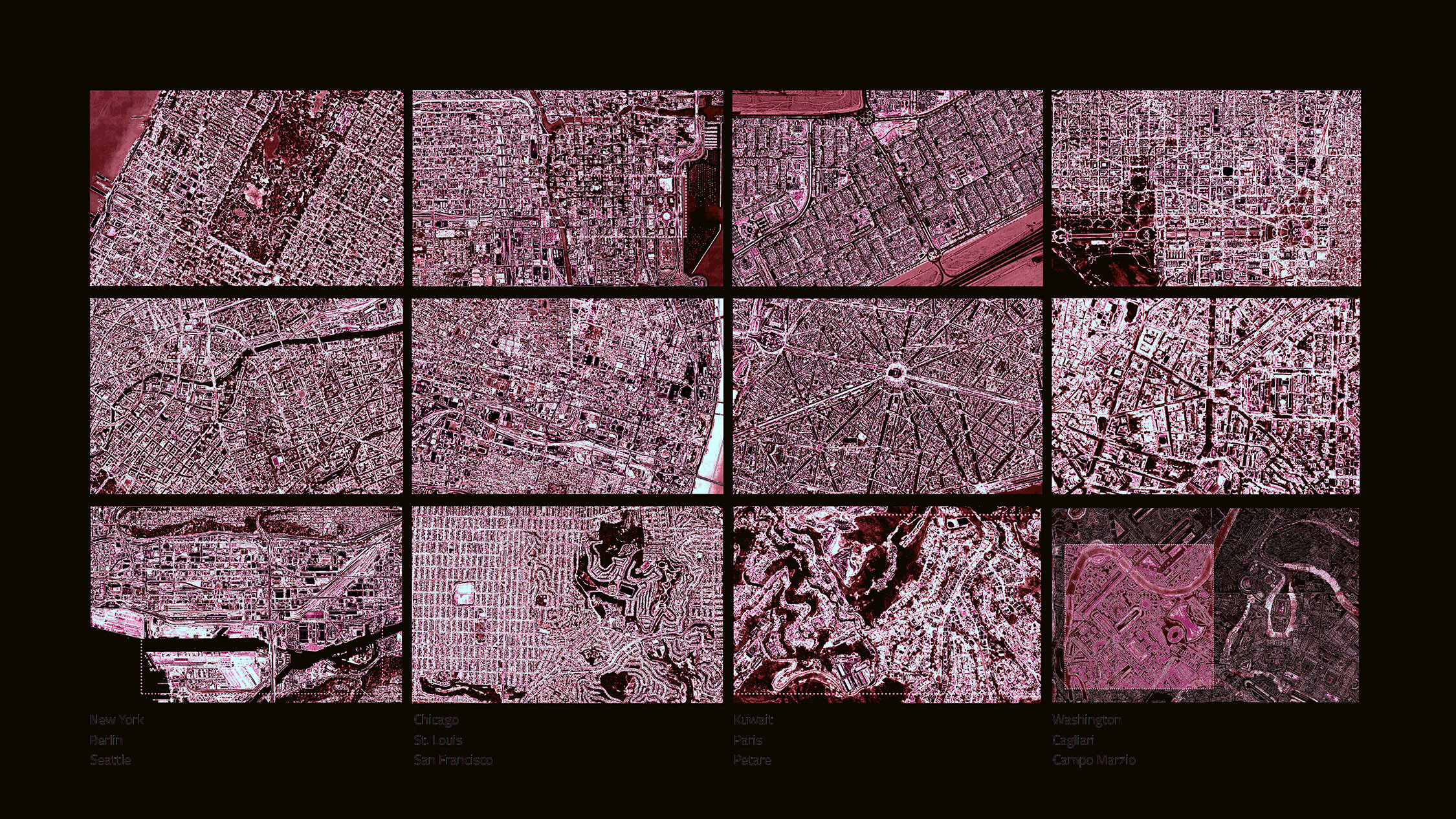
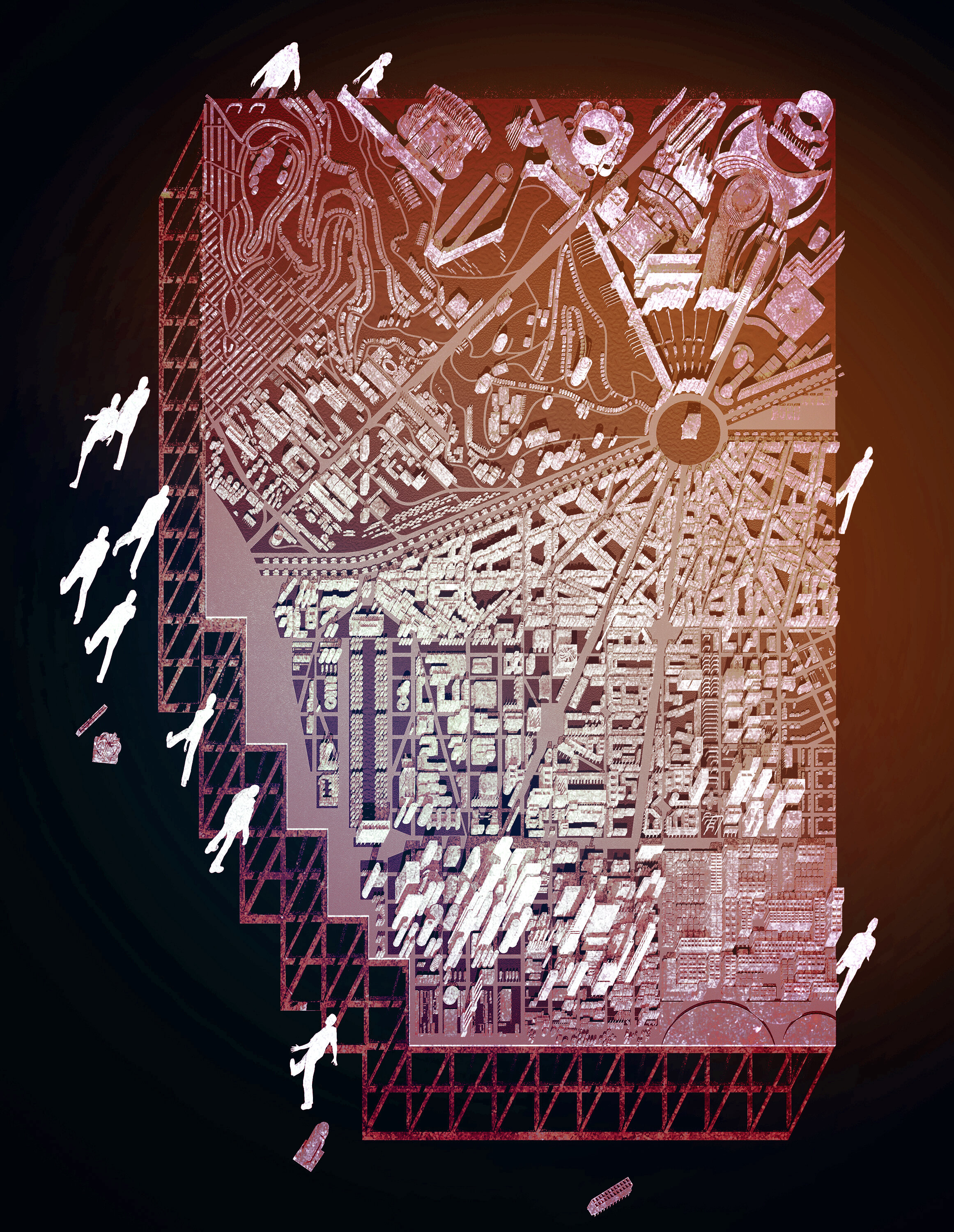
(1) What are the new kinds of buildings and infrastructure that might emerge if vehicular infrastructure is dedicated to autonomous vehicles? What is the potential of this new architecture to shape cities and new kinds of civic space? The model will be attuned to photogrammetry and 3D scanning technology and, therefore, will be made through technologies similar to those used in autonomous vehicles, thus, accounting for machine vision throughout the process of design. As such, this model will examine new kinds of buildings, cities, and public spaces that are calibrated to remote sensing and navigation technology rather than human optics. Additionally, the widespread use of autonomous vehicles in the future will allow for networked traffic patterns that streamline road use, as well as an increase in ride-sharing with less need for individual vehicle ownership. Consequently, this study will examine the potential of cities which need fewer roads, parking lots, and parking structures. Researchers will document networks of traffic in existing city frameworks and create new maps that speculate on how urban form might change in relation to streamlined vehicular infrastructure and increased public and pedestrian realm.
(2) What digital fabrication techniques could best achieve equivalency with real-world conditions and what new material systems or hybrid digital fabrication techniques might emerge from this scale material research? In order to address the sensing technologies of autonomous vehicles, the team will tune material qualities—color, texture, sheen, opacity, translucency, albedo, and luminosity—and layer these onto architectural form and urban space. In addition, atmospheric interference like fog, smog, rain, and glare will need to be modeled in the environment. As such, it will be necessary to incorporate multiple digital tools and various equipment in order to achieve these effects. Vale and research assistants in the School of Architecture will composite digital fabrication processes—3D printing, laser cutting, CNC routing, CNC hot-wire foam cutter, CNC airbrush painting, vacuum forming, fiberglass casting—along with analog building practices to create a flexible structural system that can transform for various tests. While the fabrication processes will be layered in order to be attuned to the scale model, they will present new types of interior cladding or structural systems that could translate into full-scale buildings.